树:R树
关于
空间数据
基于实体的模型:
- 0-dimensional objects:一般使用点point来表示那些对于不需要使用到形状信息的实体。
- 1-dimensional objects or linear objects:用于表示一些路网的边,一般用于表示道路road。 (polyline)
- 2-dimensional objects or surfacic objects:用于表示有区域面积的实体。 (polygon)
常用的空间数据查询方式:
- 窗口查询:给定一个查询窗口(通常是一个矩形),返回与查询窗口相重叠的物体。
- 点查询:给定一个点,返回包含这个点的所有几何图形。
空间数据获取的方法
通常,我们不选择去索引几何物体本身,而是采用“最小限定箱”(MBB:minimum bounding box)作为不规则几何图形的 key 来构建空间索引:
- 二维:称之为“最小限定矩形”(MBR:minimum bounding retangle)。
- 三维:称之为“最小限定箱”(MBB:minimum bounding box)。


通过索引操作对象的 MBB 进行查询,步骤:【???】
- Filtering:过滤掉 MBB 不相交的数据集,剩下的 MBB 被索引到的称为一个数据的超集。
- Refinement:测试实际的几何形状会不会满足查询条件,精确化。


使用:
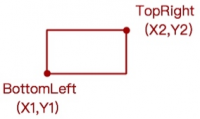
- 用数据表示一个 MBR:
- 通常,只需要两个点就可限定一个矩形,也就是矩形某个对角线的两个点(“左下右上”或“左上右下”)就可以决定一个唯一的矩形。
- 表示一个点的数据:
public class Point{ //用一个类来表示一个点 public Float x; public Float y }
- 表示一个 MBR 的数据:
public class MBR{ public Point BottomLeft; public Point TopRight; }
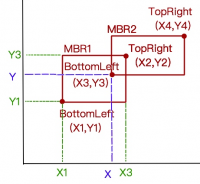
- 判断两个 MBR 是否相交:
- 如果一个MBR的TopLeft或者BottomRight的(x,y)位于另一个MBR的 xRange 和 yRangle 里面,则说明这两个MBR相交。


R树
简介
R树 是 B树 在高维空间的扩展:采用 B树 分割空间的思想,并在添加、删除操作时采用合并、分解结点的方法,保证树的平衡性。因此,R树就是一棵用来存储高维数据的平衡树。
- 每个 R树 的叶子结点包含了多个指向不同数据的指针,这些数据可以是存放在硬盘中的,也可以是存在内存中。
- 根据 R树 的这种数据结构,当需要进行一个高维空间查询时,只需要遍历少数几个叶子结点所包含的指针,查看这些指针指向的数据是否满足要求即可。
1984年,加州大学伯克利分校的Guttman发表了一篇题为“R-trees: a dynamic index structure for spatial searching”的论文,向世人介绍了R树这种处理高维空间存储问题的数据结构。 * Guttman, A.; “R-trees: a dynamic index structure for spatial searching,” ACM, 1984, 14
R树在现实领域中能够解决的例子:查找20英里以内所有的餐厅。
- 如果没有 R树 怎么解决?
- 一般情况下我们会把餐厅的坐标“(x,y)”分为两个字段存放在数据库中,一个字段记录经度,另一个字段记录纬度。这样的话我们就需要遍历所有的餐厅获取其位置信息,然后计算是否满足要求。
- 如果一个地区有100家餐厅的话,我们就要进行100次位置计算操作了,如果应用到谷歌地图这种超大数据库中,这种方法便必定不可行了。
- R树 的解决?
- R树采用了一种称为“MBR”(Minimal Bounding Rectangle,即最小边界矩形)的方法对空间进行分割……
- R树 使我们不必遍历所有数据即可获得答案,效率显著提高。
- 如下:
引子
R树 示例:

R树 采用了一种称为“MBR”对空间进行分割:从叶子结点开始用矩形(rectangle)将空间框起来,结点越往上,框住的空间就越大,以此对空间进行分割。
“MBR”分割示例:(假设所有数据都是二维空间下的点)

- 如图,“shape of data object”所标记的是一块不规则图形,我们把它看作是多个数据围成的一个区域。为了实现“R树”结构,用一个最小边界矩形恰好框住这个不规则区域,这样就构造出了一个区域:“R8”。
- 其他实线包围住的区域(“R8”到“R19”)同理。【这些矩形都将被存储在页子结点】
- 如图,可以发现“R8”,“R9”,“R10”三个矩形距离最为靠近,因此就可以用一个更大的矩形“R3”恰好框住这 3 个矩形。【叶子节点的父节点】
- 同理:“R15”,“R16”被“R6”恰好框住;“R11”,“R12”被“R4”恰好框住,等等。
- 重复上一步,所有最基本的最小边界矩形被框入更大的矩形中之后,再次迭代,用更大的框去框住这些矩形。
最后,根结点存放的是两个最大的矩形,这两个最大的矩形框住了所有的剩余的矩形,当然也就框住了所有的数据。
- 下一层的结点存放了次大的矩形,这些矩形缩小了范围。
- 每个叶子结点都是存放的最小的矩形,这些矩形中可能包含有n个数据。
对应于地图的情况:
- 打开地图(也就是整个R树),先选择国内还是国外,【对应根结点】
- 然后选择华南地区(对应第一层结点),选择广州市,【对应第二层结点】
- 再选择天河区,【对应第三层结点】
- 最后选择天河城所在的那个区域。【对应叶子结点,存放有最小矩形】
如图:

定义(性质)
- 非根非叶子结点拥有“m/2”至“m”个子结点(子树)。
- 叶子结点包含有“m/2”至“m”个记录索引(条目)。
- 作为根结点的叶子节点所具有的记录个数可以少于“m/2”。
- 对于节点(叶子、非叶子节点)的所有记录(条目),“I”是最小的可以在空间中完全覆盖这些记录所代表的点的矩形(“矩形”是可以扩展到高维空间的)。
- 所有叶子结点都位于同一层,因此 R树 为平衡树。
- 【条目个数 = 子结点个数】
结构
如图,“R树的节点存储结构”:

叶子结点
叶子结点所保存的数据形式为:“(I, tuple-identifier)”,其中:
- “I”:是一个 n 维空间的矩形,并可以恰好框住这个叶子结点中所有记录代表的 n 维空间中的点。【框住点的最小矩形,如引子中的“R8”】
- 如:“I=(I0,I1,…,In-1)”。
- “tuple-identifier”:表示的是一个存放于数据库中的 tuple(多元组),也就是一条记录,它是 n 维的。【所有的点,如引子中构成“shape of data object”的所有点是一个条目】
示例,在二维空间中的叶子结点所要存储的信息:

如图,
- “I”所代表的就是图中的矩形,其范围是“a<=I0<=b”,“c<=I1<=d”。
- “tuple-identifier”,在图中即表示为那两个点。
- 这种形式完全可以推广到高维空间。
非叶子结点
非叶子结点存放的数据结构为:“(I, child-pointer)”,其中:
- “I”:覆盖所有孩子结点对应矩形的矩形。【框住所有孩子节点矩形的最小矩形,如如引子的“R3”】
- 如:“I=(I0,I1,…,In-1)”。
- “child-pointer”:表示指向孩子结点的指针。
R树操作
搜索
R树 的搜索操作:【搜索内容为“矩形”,判断条件是“与节点矩形是否有重合”】
- 输入一个搜索矩形。
- 返回所有符合查找信息的记录条目。
搜索过程:
- 如果当前节点是非叶子节点:
- 若当前节点的矩形(“I”)与“搜索矩形”有重合,那么对当前节点存储条目所指向的子节点进行“搜索过程”。
- 若当前节点的矩形(“I”)与“搜索矩形”没有重合,无匹配。
- 如果当前节点是叶子节点:
- 若当前节点的矩形(“I”)与“搜索矩形”有重合,返回当前节点存储条目中符合条件的记录。
- 若当前节点的矩形(“I”)与“搜索矩形”没有重合,无匹配。
示例:

红色查询区域,与“P3”子树“P4”子树相重叠,所以根据“缩小空间”的思想,只需要遍历“P3”和“P4”所在子树就行而无需遍历“P1”,“P2”。
插入
R树 的插入操作也同 B树 的插入操作类似:
- 当新的数据记录需要被添加入叶子结点时,若叶子结点溢出,那么我们需要对叶子结点进行分裂操作。
- 叶子结点的插入操作会比搜索操作要复杂。
- 插入操作需要一些辅助方法才能够完成。
插入过程:
- 查找合适插入的叶子结点:(从根节点开始)
- 如果当前节点不是叶子节点:则遍历节点的子节点,找到“添加新条目时,节点矩形增量最小”的节点。
- (如果有多个这样的结点,那么选择面积最小的结点)
- 如果当前节点为叶子结点,则直接返回当前叶子节点。
- 如果当前节点不是叶子节点:则遍历节点的子节点,找到“添加新条目时,节点矩形增量最小”的节点。
- 插入新条目至叶子节点:
- 如果叶子节点条目个数 < 最大值(“M”):
- 插入:插入条目。
- 调整:(如果需要)
- 扩大叶子节点矩形“I”为所有条目的“MBR”。
- 扩大父节点矩形“I”为所有条目的“MBR”。
- 如果叶子节点条目个数 = 最大值(“M”):
- 分裂:将该叶子节点分裂为两个新的叶子节点,用于包含已有条目与新插入条目;
- 调整:(如果需要)
- 扩大叶子节点矩形“I”为所有条目的“MBR”。
- 扩大父节点矩形“I”为所有条目的“MBR”。
- 如果叶子节点条目个数 < 最大值(“M”):
- 【如果父节点条目数引起“分裂”,则向上迭代“调整父节点矩形”过程】
示例:
- 插入空间足够,且不需扩大矩形:
- 插入空间足够,但需要扩大矩形:
- 插入空间不足,需要分裂该节点:
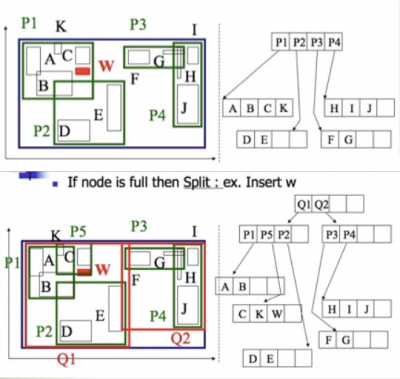
- 由于插入的“w”所在的区域“P1”的数据条目空间不足,所以采用分裂算法将结点“P1”分裂为“P1”(包含“A”,“B”)和“P5”(包含“k”,“w”)两个结点;
- 分裂之后导致父节点条目数过多,需要向上传递,最终导致生成新的根结点“Q1”,“Q2”。



分裂算法
分类算法有多种:

以“Quadratic”方案为例,其算法:
- 选取种子条目seed:
- 从节点所有条目中挑选两个条目(E1、E2);
- 计算两个条目的 MBR 增量:“d = MBR(E1, E2) - E1 - E2”;
- 重复以上步骤,计算每一对条目的增量,并选取增量 d 最大的一对作为种子条目。
- 【选择增量最大,则种子条目的矩形对角线最远,分裂之后的新节点重叠可能最小】
- 【选择增量最大,则种子条目的矩形对角线最远,分裂之后的新节点重叠可能最小】
- 将剩下条目分配与这两个seed,使其各成为一组。
- 【分配的原则就是离谁比较“近”就和谁一组:用增量“d1=MBR(E,seed1)-E-seed1”)与增量“d2=MBR(E,seed2)-E-seed2”的大小判断哪个近】
- 【分配的原则就是离谁比较“近”就和谁一组:用增量“d1=MBR(E,seed1)-E-seed1”)与增量“d2=MBR(E,seed2)-E-seed2”的大小判断哪个近】



除了上述“Quadratic”的分裂算法之外还有其他的分裂算法,但是分裂的效果都不如“R*树”(R树的改进版)的算法好。
删除
R树 的删除操作与 B树 的删除操作会有所不同,不过同B树一样也会涉及到压缩等操作。
- R树 的删除同样比较复杂,需要用到一些辅助函数来完成整个操作。
删除过程:
- 查找含有记录的叶子结点:(从根节点开始)
- 如果当前节点不是叶子节点:则遍历节点的子节点,找到“与条目的 MBR 有重合”的节点。
- (向下迭代此过程)
- 如果当前节点为叶子结点:
- 若当前节点存在对应条目,返回当前节点。
- 若当前节点无对应条目,终止删除。
- 如果当前节点不是叶子节点:则遍历节点的子节点,找到“与条目的 MBR 有重合”的节点。
- 从叶子节点删除条目:
- 如果删除后叶子节点中条目个数 >= 条目最小值(m/2):
- 删除:删除条目;
- 调整:(如果需要)
- 缩小叶子节点矩形“I”为所有条目的“MBR”。
- 缩小父节点矩形“I”为所有条目的“MBR”。
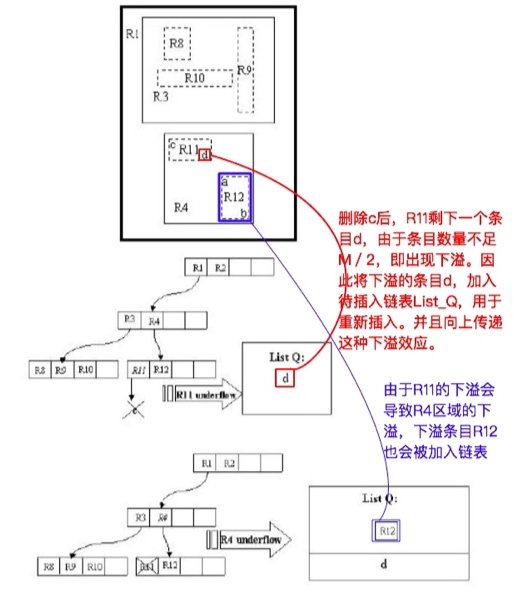
- 如果删除后叶子节点中条目个数 < 条目最小值(m/2):
- 删除:
- 删除节点,并将节点中剩余条目加入“待插入链表”;
- 删除父节点条目:对父节点的迭代“删除过程”。
- 【如果父节点出现下溢,同样进入“待插链表”】
- 重插入:将“待插链表”中的条目重新插入链表。
- 【原叶子结点的条目可以使用“插入操作”进行重新插入;原非叶子结点的条目必须插入删除之前所在层的结点,以确保它们所指向的子树还处于相同的层】
- 删除:
- 如果当前叶子节点即为根节点,则直接删除并调整矩形“I”即可。
- 如果删除后叶子节点中条目个数 >= 条目最小值(m/2):
与“B树”相比,若出现条目(关键字个数)下溢:
- “B树”删除时,将会导致:从父节点借(兄弟节点关键字够多);或与相邻节点合并(兄弟节点关键字不够)。
- “R树”删除时,将会导致节点的条目重新插入。
删除下溢,示例:
- 删除记录“c”:
- 上一步删除条目“c”与节点“R12”之后,这个删除操作继续向上传递,直到根结点条目“R1”被插入“Q”中,此时,根结点就只剩下了“R2”。
- 但是,重新插入操作会有效的解决这个问题:
- 插入“R3”,“R12”,“d”至它原来所处的层;(根结点只有一个条目)
- 根据“Inert”中的操作,把根结点删除,并将其孩子结点(“R5”,“R6”,“R7”,“R3”所在的结点)置为根结点;
- 至此,删除操作结束。


